@linClubs
lin 暂无简介
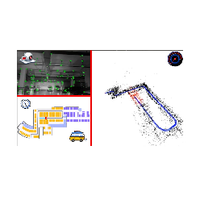
第四版ORB_SLAM33,安装就下载这个
高博orb稠密见图,无回环。安装前看readme
使用yolov5-v6先完成车位号的检测与识别,然后采用opencv-dnn-cpp模块部署;c++环境,部署只需要要opencv库