@linClubs
lin 暂无简介
获取左右相机的视差图,从而双目立体视觉获取深度图,python版本,相机标定工程;详情请阅读C++与python目录下README.md
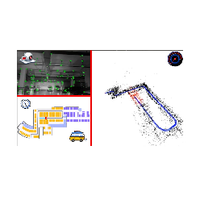
基于ORB_SLAM3算法在无网络、GPS等条件下、实现地下车库实际场景中的车辆定位,并配上手机上的二维地图进行模拟定位;视频链接:https://www.bilibili.com/video/BV13Z4y1975F#reply95109570400
自监督深度估计
第四版ORB_SLAM33,安装就下载这个
高博orb稠密见图,无回环。安装前看readme
使用yolov5-v6先完成车位号的检测与识别,然后采用opencv-dnn-cpp模块部署;c++环境,部署只需要要opencv库