# Hackathon2022
**Repository Path**: heidibai/hackathon2022
## Basic Information
- **Project Name**: Hackathon2022
- **Description**: Hackathon2022
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: master
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 1
- **Forks**: 1
- **Created**: 2022-10-17
- **Last Updated**: 2022-10-17
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
- 团队名称:Spark斯巴克
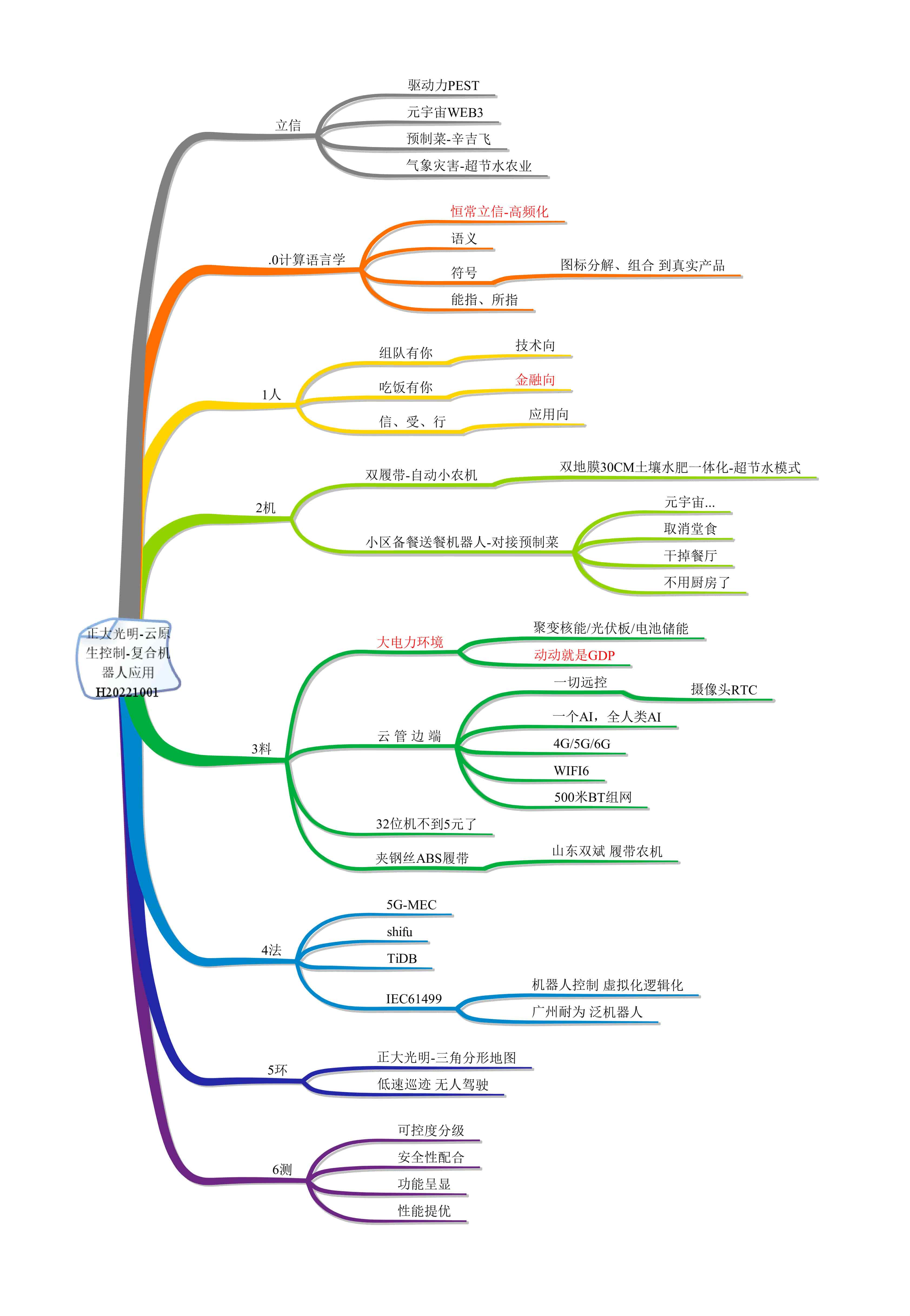
- 项目名称:云原生复合机器人控制系统
- 作者:@HeidiBai @he3kulai @MengZheK
- 组别:应用组
## 项目介绍
云原生复合机器人定义未来外卖餐饮新形式。复合机器人用履带式双轮驱动底盘以实现社区小区园区低速无人驾驶;同时该机器人符合用户餐饮需求-对接**预制菜产业链**,炒回锅肉、面条饺子馄炖等。
用户手机小程序或 APP 点餐后,复合机器人在玻璃罩下透明空间内开始备餐(支持摄像头下的过程回放),同时移动到客人拟定取餐位置;用户可通过面部识别或手机扫码取餐。
团队参加TiDB赛是为了利用 TiDB 分布式和实时数据库特性获得5G-MEC/WIFI6低延时网络下的机器人控制云端化,从而利用机器人来解决的疫情下 **取消堂食** 的状态,解决吃饭的问题。

 ## 项目设计
### 项目架构思维导图:
[](https://imgse.com/i/xBahJe)
[](https://imgse.com/i/xBafiD)
### **项目 PEST:**
【金山文档】 SPARK——PEST https://kdocs.cn/l/cchkGh2KWvxR
--------------------------
### 技术实现方案:
1.机器人 WIFI/BT遥控上位机:https://github.com/HeidiBai/CatosciApp.git
2.机器人实时视频传输方案:https://mp.weixin.qq.com/s/uRHS659_iD0akz6UwTu3qw
- 机器人控制 APP: https://github.com/catosci/CatosciApp/blob/main/release/catosci.apk
3.机器人通信及定位解决方案 LuatOS-Air: https://gitee.com/openLuat/Luat_Lua_Air724U/tree/master/product/%E6%98%86%E4%BB%91%E9%95%9C
[](https://imgse.com/i/xBd3FO)
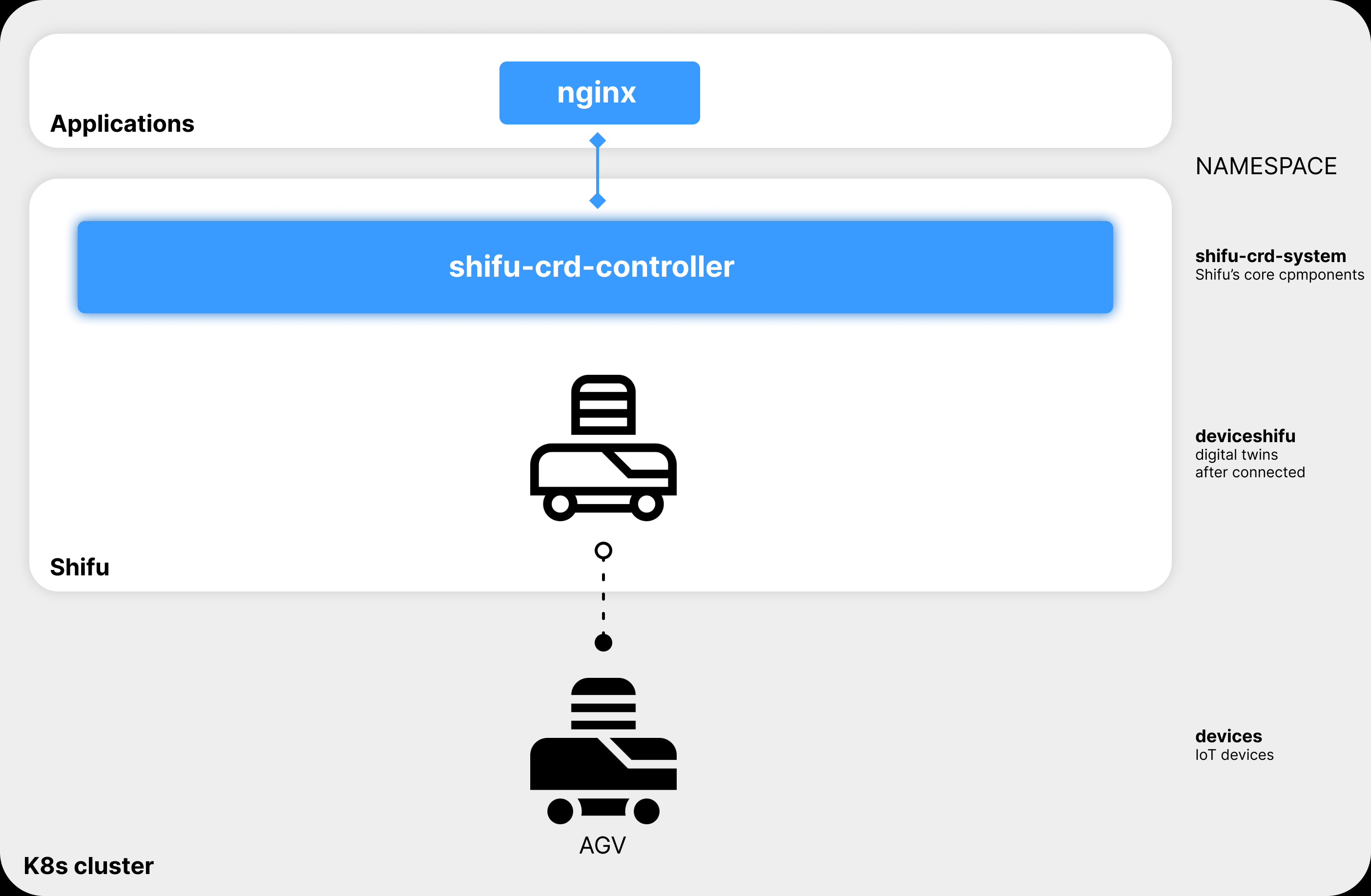
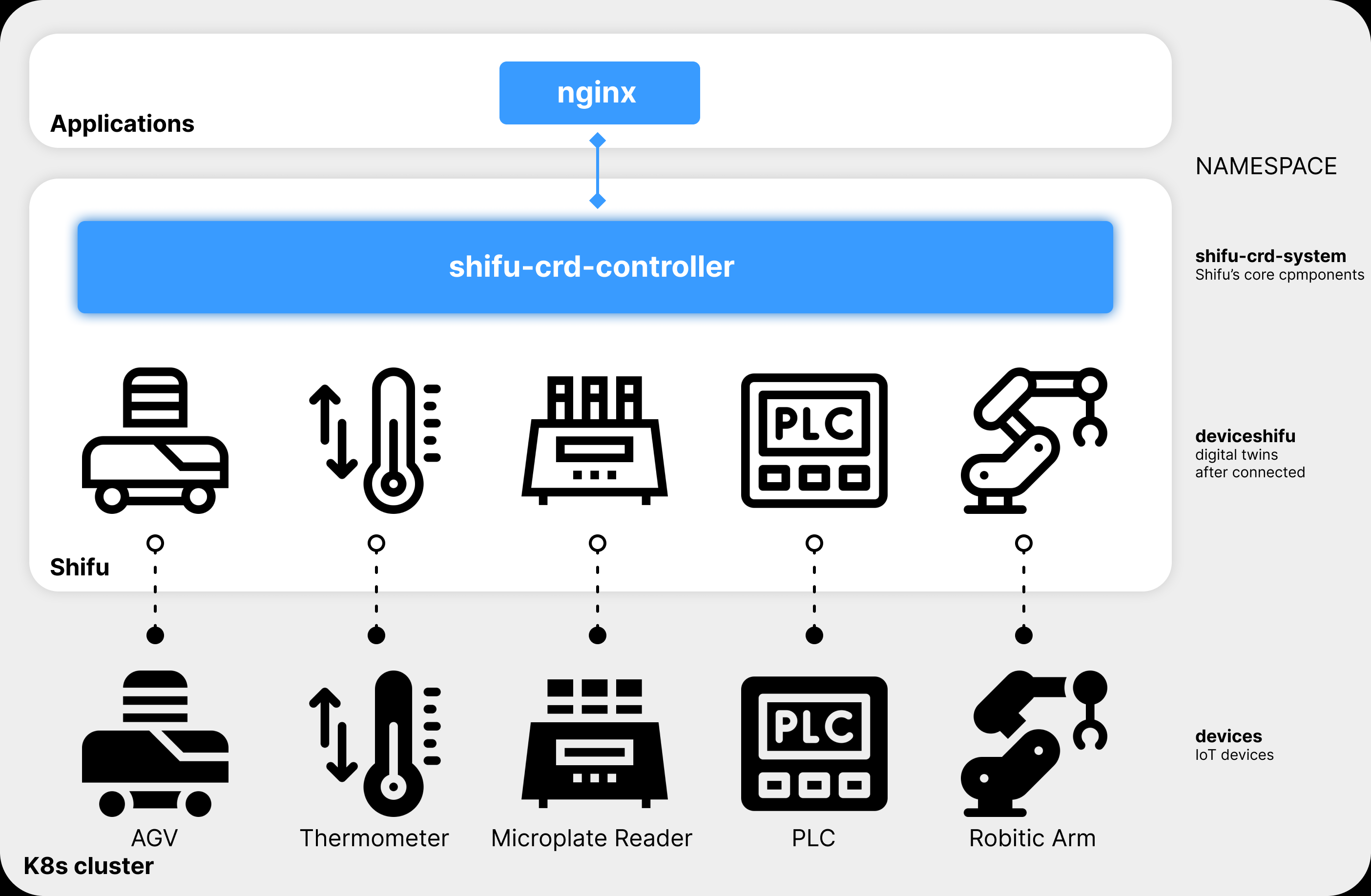
4.提供全场景物联网解决方案,物联网开发工具:Shifu https://shifu.run/docs/tutorials/demo-try/
[](https://shifu.run/zh-Hans/assets/images/architecture-edbdb7e8e9e822c79dea1678626ca488.png)
5.机器人底盘控制架构示意图:
[](https://imgse.com/i/xD480K)
[](https://imgse.com/i/xD4GTO)
6.IEC61499应用(机器人实时控制系统基于基于IEC61499):IEC61499 是关于分布式工业测量,控制系统的功能块标准。
[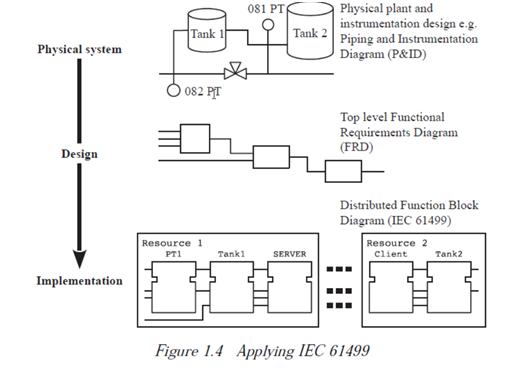](https://img-blog.csdnimg.cn/20210124102655921.png)
**IEC61499 实时网络架构**
分布式工业控制网络要求网络传输具有实时性和确定性,确定性要求网络上的所有节点实现时间同步,这可以使用IEEE1588/PTP 协议来保证,为了保证数据传输的确定性和实时性,可以采取时分多路复用(TDMA) 实现,时间触发网络技术是帧协议网络TDMA 的方法。将这些技术应用于IEC61499 分布式控制系统。
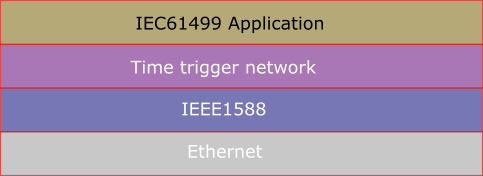
- 系统架构
[](https://img-blog.csdnimg.cn/5ec58626eaa143dfb95818db3890136d.png)
在以太网络基础上实现IEEE1588/PTP ,实现设备的时间同步。在IEEE1588 的基础上实现时间触发网络协议。IEC61499 的应用程序使用分时网络和IEEE1588 提供的同步时钟,Sync帧同步事件,时隙分配器,同步时钟延时功能块,实现实时通信
- 物理架构
[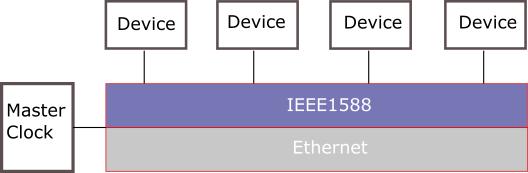](https://img-blog.csdnimg.cn/ed892f4be4fd4fcbb7f3663782305c81.png)
在网络中有一个高精度,高可靠性的主时钟设备。它提供IEEE1588/PTP 的主时钟源,必要时可以考虑采取冗余设计和连接GPS、北斗参考时钟。
实时IEC61499 系统-网络篇:http://t.csdn.cn/Bc3SE
## 项目设计
### 项目架构思维导图:
[](https://imgse.com/i/xBahJe)
[](https://imgse.com/i/xBafiD)
### **项目 PEST:**
【金山文档】 SPARK——PEST https://kdocs.cn/l/cchkGh2KWvxR
--------------------------
### 技术实现方案:
1.机器人 WIFI/BT遥控上位机:https://github.com/HeidiBai/CatosciApp.git
2.机器人实时视频传输方案:https://mp.weixin.qq.com/s/uRHS659_iD0akz6UwTu3qw
- 机器人控制 APP: https://github.com/catosci/CatosciApp/blob/main/release/catosci.apk
3.机器人通信及定位解决方案 LuatOS-Air: https://gitee.com/openLuat/Luat_Lua_Air724U/tree/master/product/%E6%98%86%E4%BB%91%E9%95%9C
[](https://imgse.com/i/xBd3FO)
4.提供全场景物联网解决方案,物联网开发工具:Shifu https://shifu.run/docs/tutorials/demo-try/
[](https://shifu.run/zh-Hans/assets/images/architecture-edbdb7e8e9e822c79dea1678626ca488.png)
5.机器人底盘控制架构示意图:
[](https://imgse.com/i/xD480K)
[](https://imgse.com/i/xD4GTO)
6.IEC61499应用(机器人实时控制系统基于基于IEC61499):IEC61499 是关于分布式工业测量,控制系统的功能块标准。
[](https://img-blog.csdnimg.cn/20210124102655921.png)
**IEC61499 实时网络架构**
分布式工业控制网络要求网络传输具有实时性和确定性,确定性要求网络上的所有节点实现时间同步,这可以使用IEEE1588/PTP 协议来保证,为了保证数据传输的确定性和实时性,可以采取时分多路复用(TDMA) 实现,时间触发网络技术是帧协议网络TDMA 的方法。将这些技术应用于IEC61499 分布式控制系统。
- 系统架构
[](https://img-blog.csdnimg.cn/5ec58626eaa143dfb95818db3890136d.png)
在以太网络基础上实现IEEE1588/PTP ,实现设备的时间同步。在IEEE1588 的基础上实现时间触发网络协议。IEC61499 的应用程序使用分时网络和IEEE1588 提供的同步时钟,Sync帧同步事件,时隙分配器,同步时钟延时功能块,实现实时通信
- 物理架构
[](https://img-blog.csdnimg.cn/ed892f4be4fd4fcbb7f3663782305c81.png)
在网络中有一个高精度,高可靠性的主时钟设备。它提供IEEE1588/PTP 的主时钟源,必要时可以考虑采取冗余设计和连接GPS、北斗参考时钟。
实时IEC61499 系统-网络篇:http://t.csdn.cn/Bc3SE