diff --git "a/\345\237\272\344\272\216\346\267\261\345\272\246\345\274\272\345\214\226\345\255\246\344\271\240\347\256\227\346\263\225\347\232\204\344\273\277\347\234\237\345\210\260\345\256\236\350\267\265\346\225\231\347\250\213" "b/\345\237\272\344\272\216\346\267\261\345\272\246\345\274\272\345\214\226\345\255\246\344\271\240\347\256\227\346\263\225\347\232\204\344\273\277\347\234\237\345\210\260\345\256\236\350\267\265\346\225\231\347\250\213"
new file mode 100644
index 0000000000000000000000000000000000000000..080c89a8d9752c06ffa3ed8a832bc781be5bf364
--- /dev/null
+++ "b/\345\237\272\344\272\216\346\267\261\345\272\246\345\274\272\345\214\226\345\255\246\344\271\240\347\256\227\346\263\225\347\232\204\344\273\277\347\234\237\345\210\260\345\256\236\350\267\265\346\225\231\347\250\213"
@@ -0,0 +1,246 @@
+# 基于深度强化学习算法的仿真到实践教程
+
+## ubuntu18.04 + pytorch+ ros-melodic+gazebo11
+
+# 环境配置:
+
+ubuntu18.04安装跳过 ,虚拟机和双系统都可以
+
+虚拟机:[在虚拟机中安装Ubuntu 18.04 - 简书 (jianshu.com)](https://www.jianshu.com/p/c743aaa847de)
+
+双系统:[(13条消息) Windows 10 安装ubuntu 18.04 双系统(超详细教程)_Ycitus的博客-CSDN博客_win10安装ubuntu双系统](https://blog.csdn.net/qq_43106321/article/details/105361644)
+
+## ROS-melodic 安装:
+
+```shell
+wget http://fishros.com/install -O fishros && . fishros
+```
+
+## rosdep:
+
+```
+wget http://fishros.com/install -O fishros && . fishros
+```
+
+## 下载安装anaconda:
+
+https://mirrors.tuna.tsinghua.edu.cn/anaconda/archive/Anaconda3-2021.11-Linux-x86_64.sh
+
+
+bash Anaconda3-2021.11-Linux-x86_64.sh
+
+## 创建安装虚拟环境:
+
+```shell
+git clone https://gitee.com/fangxiaosheng666/PPO-SAC-DQN-DDPG
+cd PPO-SAC-DQN-DDPG
+conda env create -f py2.yaml
+```
+
+## 创建工作空间:
+
+```shell
+mkdir -p ws/src
+cd ws/src
+git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
+git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
+git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
+cd ..
+```
+
+## 修改激光雷达线数:
+
+参考:[TurtleBot3 (robotis.com)](https://emanual.robotis.com/docs/en/platform/turtlebot3/machine_learning/#machine-learning)
+
+```
+roscd turtlebot3_description/urdf/
+gedit turtlebot3_burger.gazebo.xacro
+#如果想可视化激光雷达,把下面改成true
+
+#把激光雷达数据改成24
+
+
+ 24 # The number of sample. Modify it to 24
+ 1
+ 0.0
+ 6.28319
+
+
+
+```
+
+## 在工作空间下运行,安装ROS功能包全部依赖:
+
+```shell
+cd ws
+rosdep install --from-paths src --ignore-src -r -y
+catkin_make
+source devel/setup.bash
+```
+
+## 代码需要修改的几个路径:
+
+### 模型保存路径:
+
+```python
+def save_model(self,dir):
+ state = {'target_net':self.target_net.state_dict(),'eval_net':self.eval_net.state_dict(), 'optimizer':self.optimizer.state_dict(), 'epoch':e}
+ torch.save(state,"/home/ffd/QDN/model/"+ dir+"a.pt")
+```
+
+### 加载模型继续训练,首先要有模型,不同的算法的模型不能通用,因为网络结构不同:
+
+需要加载模型的,要把self.load_models=Flase 改成True,然后加载对应算法训练的模型的路径
+
+ self.load_models=True
+ if self.load_models:
+ self.epsilon= 0
+ self.start_epoch=self.load_ep
+ checkpoint = torch.load("/home/ffd/QDN/model/"+str(self.load_ep)+"a.pt")
+
+### respawnGoal.py修改
+
+加载地图名字修改
+
+目标点修改(可以根据自己的世界要求修改目标点)如果是加载自己的地图,需要把self.stage =2 改成4,然后修改下面的坐标。
+
+```python
+ self.modelPath = os.path.dirname(os.path.realpath(__file__))
+ self.modelPath = self.modelPath.replace('/home/ffd/DRL/PPO',
+ '/home/ffd/DRL/PPO/model.sdf')
+```
+
+```python
+ self.stage = 2
+```
+
+```python
+ while position_check:
+ goal_x_list = [0.6, 1.9, 0.5, 0.2, -0.8, -1, -1.9, 0.5, 2, 0.5, 0, -0.1, -2]
+ goal_y_list = [0, -0.5, -1.9, 1.5, -0.9, 1, 1.1, -1.5, 1.5, 1.8, -1, 1.6, -0.8]
+
+ self.index = random.randrange(0, 13)
+ print(self.index, self.last_index)
+ if self.last_index == self.index:
+ position_check = True
+ else:
+ self.last_index = self.index
+ position_check = False
+```
+
+这些坐标点是根据gazebo地图给的
+
+## 如何加载自己的小车和世界
+
+```xml
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+```
+
+## 启动仿真环境:
+
+roslaunch turtlebot3_gazebo turtlebot3_stage_2.launch
+在vscore启动DQN2.py
+
+
+
+
+## 仿真效果
+PPO:
+
+[video(video-t2HjOTzy-1652683094981)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=549434701)(image-https://img-blog.csdnimg.cn/img_convert/6ec8742c0bdba36b450f1293d66dddd0.png)(title-PPO算法在ROS-turtlebot3仿真)]
+
+
+DQN:
+
+[video(video-85wyysof-1652683114244)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=891843299)(image-https://img-blog.csdnimg.cn/img_convert/3eae7dfe58cfe6a9242dbead330740c1.png)(title-DQN-200回合效果)]
+
+SAC:
+
+[video(video-Zem8foNk-1652683160999)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=553110855)(image-https://img-blog.csdnimg.cn/img_convert/57273d06044db2ae16154b36893f234d.png)(title-SAC算法)]
+
+
+## 真实环境测试:
+
+代码地址:
+
+```shell
+git clone https://gitee.com/fangxiaosheng666/PPO-SAC
+```
+
+基于离散动作的PPO:[视频](https://www.bilibili.com/video/BV1N44y1G7WJ/)
+
+
+[video(video-vmhHV9sa-1652683025548)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=255683208)(image-https://img-blog.csdnimg.cn/img_convert/86e38ba782e6002b99cadffdd0bd9088.png)(title-在机器人导航中使用深度强化学习)]
+
+
+
+基于连续动作的SAC:[视频](https://www.bilibili.com/video/BV1LY411j7jW/)
+
+
+[video(video-ilHO1s3J-1652683071979)(type-bilibili)(url-https://player.bilibili.com/player.html?aid=980761350)(image-https://img-blog.csdnimg.cn/img_convert/c7d3859414457ff06e5603738902cdd0.png)(title-sac 连续控制)]
+
+
+## 交流QQ群:877273841(学习资料交流群)
+
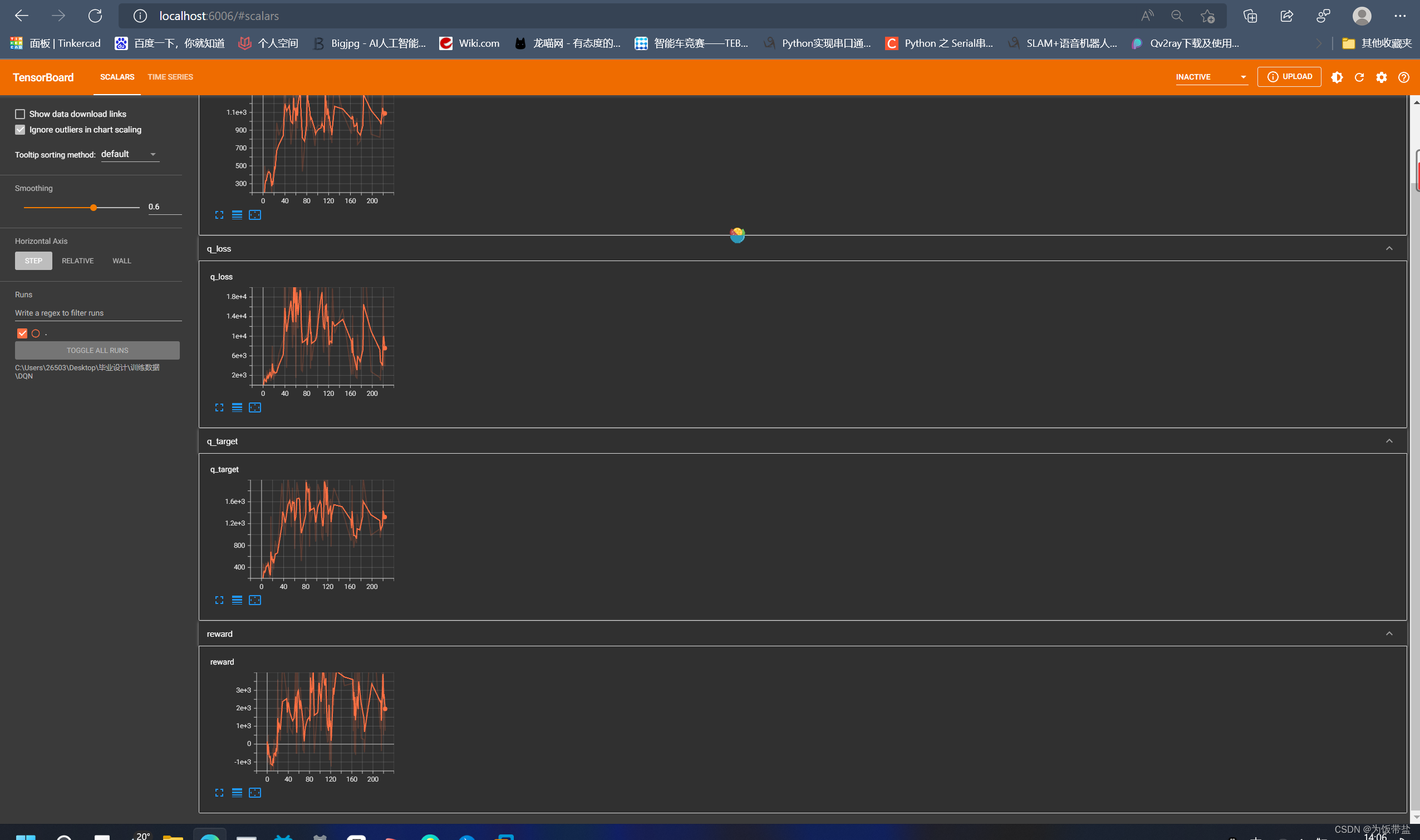
+## 训练数据可视化:
+
+使用pytorch的tensorborad.[参考](https://zhuanlan.zhihu.com/p/103630393)
+
+```shell
+tensorboard --logdir C:\Users\26503\Desktop\毕业设计\训练数据\DQN
+```
+
+
+
+# 深度强化学习-学习最前沿中文资源推荐:
+
+## 微信公众号:
+
+### 深度学习实验室
+
+### RLCN
+
+### OpenDILab
+
+# 好的课程:
+
+中文理论-[王树森](https://www.bilibili.com/video/BV1YK4y1G7jw?spm_id_from=333.337.search-card.all.click)
+
+英文课程-[MIT](https://www.bilibili.com/video/BV1ZL411M7Cv?spm_id_from=333.337.search-card.all.click)
+
+## [我的小车搭建](https://blog.csdn.net/qq2650326396/article/details/122161688?spm=1001.2014.3001.5502)
+
+在这过程中可能遇到一些问题可以通过使用Bing或者Google解决。或者加QQ群
+
+下一期写算法如何迁移
+
+
+
+
+
+